Date: 14 Feb - 20 Feb
At the supervisor meeting on Monday, we identified the actions to be done by the simulation. There are three motions in total, pitch motion, yaw motion, and roll motion. We have learned the correct way to control the robot to complete the action by consulting the data. Before the research, we thought the simulation of an action is the combination of simple movements of multiple joints. In fact, the correct theory should be to control the motor by calculating the coordinates of each key point on the robot body before and after the movement. The three actions we chose apply the idea of the simulation in three directions of space, respectively. This method requires modeling the robot and applying transformation matrices to calculate the hip and foot positions.
Goals for week 3
- Research investigates kinematic modeling of quadruped robots.
- Study the matrix transformation of the coordinate system to calculate the coordinates before and after the action.
Motion computation theory
The modeling calculation of pitch motion
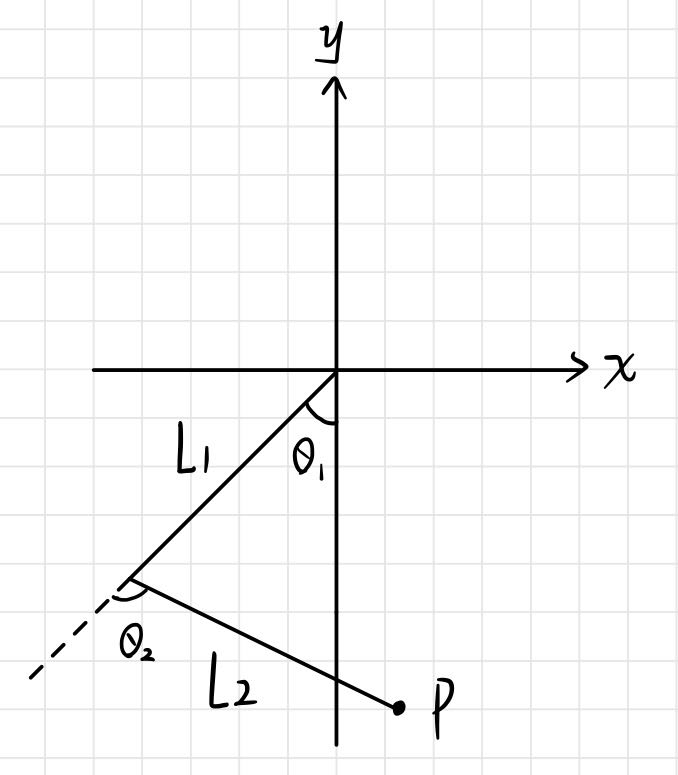
The legs of a quadruped robot can be simplified as a two-bar linkage. In the figure below,
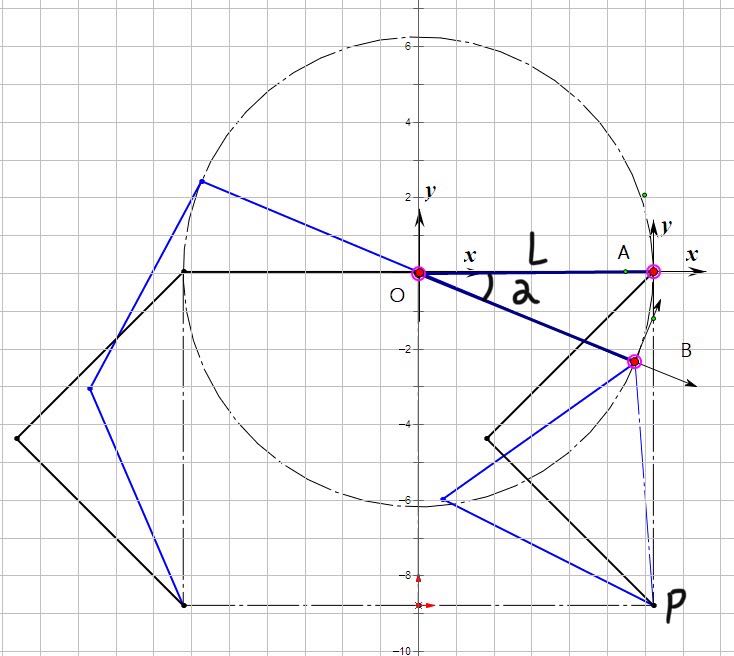
Next, we draw the modeling diagram of the pitch motion. In the picture above, point O is the center point of the robot’s torso, point A is the coordinates of the hip joint before movement, point B is the coordinates after the movement of the hip joint, L is the distance from the hip joint to the midpoint of the body in the current plane and
A
O
The coordinate of point P in the coordinate system of point B is:
Next, the angles
With the changed angles
In summary, once we have designed the
The modeling calculation of roll motion
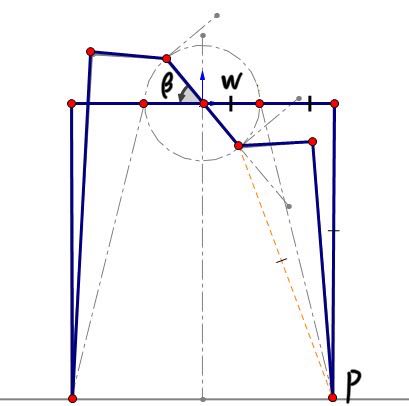
W is the distance from the hip joint to the midpoint of the fuselage in the current plane.
The two transformation matrices are:
The coordinates of point P after the movement are:
Then, the two angles at the joint can be solved by inverse kinematics.
The modeling calculation of yaw motion
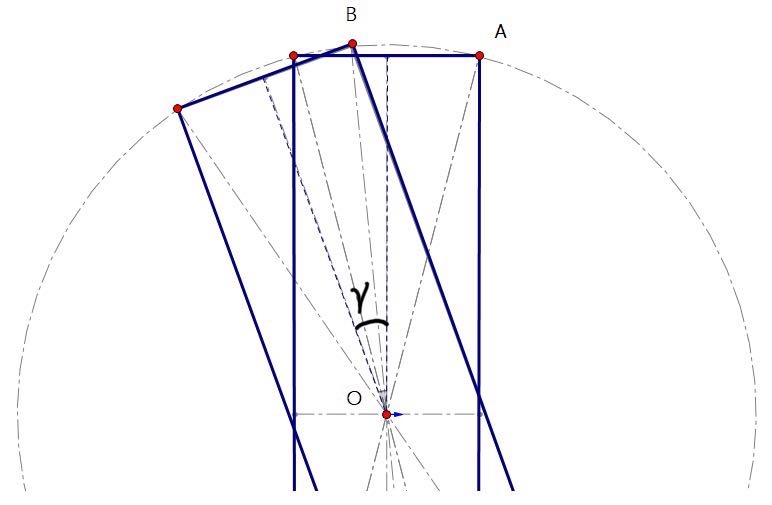
The two transformation matrices are:
The coordinates of point P after the movement are:
Then, the two angles at the joint can be solved by inverse kinematics.
Week 3 summary
This week we successfully modeled three actions. After modeling, the changes of each variable before and after the action were deduced. The feasibility of the project is verified at the theoretical level. Next, we will start writing the code to complete the simulation of the three actions in pybullet.